<< Home
<< andere Fahrräder
↓↓ Ende
Nachrüsten eines Fahrrads mit zusätzlichem Elektroantrieb
Inhalt
1. Eine besondere Steuerung des zusätzlichen Elektoantriebs
2. Das Nachrüsten eines Fahrrads mit zusätzlichem, besonders gesteuertem Elektroantrieb
3. Nachtrag (Oktober 2015)
4. Nachtrag (September 2019)
1. Eine besondere Steuerung des zusätzlichen Elektoantriebs ↑
(relativiert im Nachtrag von Oktober 2015)
Unter den zahlreichen Angeboten für Nachrüstsätze fiel mir der in Abb.1 gezeigte auf. Dabei ging es aber nicht vordergründig um das im Bild Sichtbare, denn die nötigen Komponenten sind inzwischen annähernd standardisierte und aus Massenfertigungen stammende Bauteile. Auffällig war die Beschreibung der vom Anbieter entwickelten Steuerung, die er zusammen mit eingekauften Standardteilen als Nachrüstsatz zusammenstellte. Nach ein paar Rückfragen beim Anbieter, dessen Muttersprache nicht Deutsch ist, überließ ich ihm meinen eigenen, unten folgenden Beschreibungstext, den er mir mit einem Exemplar seiner Steuerung honorierte.

 Abb.1 Katalogbild eines Nachrüstsatzes für ein Elektrofahrrad (Pedelec), eBay
Abb.1 Katalogbild eines Nachrüstsatzes für ein Elektrofahrrad (Pedelec), eBay
Abb.2 mein zum Pedelec nachgerüstetes Fahrrad
Die Beschreibung dieser besonderen Steuerung
Mit der patentierten AFFE®-Steuerung für Pedelecs erfolgt die Anpassung an das Radfahren wie es am bequemsten für den Fahrer ist, und wie er intuitiv pedalt: Er verwendet die Gangschaltung so, dass er möglichst immer mit gleicher Trittfrequenz und gleicher Fußkraft (entspricht gleichem Drehmoment) und somit immer mit gleicher Leistung fährt.)*
Der Nabenmotor wird so gesteuert, dass seine Antriebsleistung ebenfalls - wenigstens annähernd - immer gleich ist, indem sein Abtriebsdrehmoment der gewählten Gangstufe angepasst wird. Der Fahrer muss sein Verhalten nicht ändern. Er erfährt lediglich, dass das
Radfahren weniger anstrengend geworden ist.
Wenn er seine Leistung nicht reduzieren will, kann er selbstverständlich kräftiger treten und somit schneller pedalieren und schneller fahren als bisher. Weil er den langsamsten Gang dann möglicherweise kaum noch benutzt, kann er sich die Grundübersetzung seiner Gangschaltung ändern lassen und mit gewohnter Trittfrequenz (und gewohnter Fußkraft) zusammen mit der Elektrounterstützung schneller als vor der Umrüstung fahren.
Nach dem Runterschalten ist das am Hinterrad wirksame Fahrer-Drehmoment größer. Das Drehmoment des in einem der Laufräder eingebauten Motors wird entsprechend der verkleinerten Gangübersetzung)** vergrößert (beim höchsten Gang ist der Motor auf etwa 50% seiner Nennleistung eingestellt). Das Besondere der beschriebenen Steuerung ist, dass mit dem Verhältnis zwischen der Drehzahl der Laufräder und der Drehzahl der Pedalkurbel die eingestellte Übersetzung erkannt wird. Für die Messungen werden der Motor selbst und der Sensor für die Kurbelbewegung gebraucht. Zusätzliche Sensoren sind nicht erforderlich.
Die dem Übersetzungsverhältnis (dem Schaltgang) entsprechenden Motor-Drehmomente lassen sich noch von Hand mit Stufenschalter oder stufenlos mit Gasgriff erhöhen. Zudem wird im höchsten Gang das zunächst auf eta 50% Nennleistung begrenzte Motor-Drehmomentent automatisch erhöht, wenn die Kurbeldrehzahl höher als 30 U/min ist.
Die Steuerung schaltet den Motor sehr schnell nach Aufhören des Pedalierens ab, so dass die sonst nötige und übliche schnelle Zwangs-Unterbrechung mit Hilfe eines Schalters am Handbremshebel entfallen kann.
)* Das Drehmoment ist das Produkt aus Fußkraft und Pedalarm-Länge.Die Leistung ist das Produkt aus Drehmoment und Drehzahl (Trittfrequenz).
)** DIN-Definition: Übersetzung = Verhältnis der Drehzahl des treibenden zur Drehzahl des getriebenen (Zahn)-Rads.
2. Das Nachrüsten eines Fahrrads mit zusätzlichem, besonders gesteuertem
Elektroantrieb ↑
Ich bestellte zusammen mit der von mir "verdienten" Steuerung alle in Abb.1 außer der Felge abgebildeten Teile. Das Einspeichen des Nabenmotors 6 (mit Umlaufrädergetriebe) in mein vorhandenes Vorderrad wollte ich mir als handwerkliche Herausforderung und als Denkaufgabe (Stichwort: zweifach gekreuzte Speichen 7) nicht entgehen lassen. Diese Arbeit konnte ich an einem Abend erledigen. Ändern (Biegen, Kürzen und Bohren) brauchte ich nur den Halter des Sensors 4, weil ich ihn hinter der linken Tretkurbel montieren wollte (Abbildungen 6 und 7: rechts ist wenig Platz, und der Sensor könnte von der eventuell herunterfallenden Kette beschädigt werden). Die Montage der übrigen Teile benötigte etwa zwei halbe, nicht sehr arbeitsintensive Nachmittage. Das einigermaßen ansehnliche Verlegen der Kabel, die ich leider nicht auf Maß verkürzt bestellte, ging weniger schnell vonstatten, als vorher angenommen. Ich präsentiere die Ergebnisse in ein paar folgenden detaillierten Fotos.
Manche Besitzer gekaufter (relativ teurer) Pedelecs sind überrascht, dass man beim Schritt zu elektrisch unterstütztem Fahren sein vorheriges Fahrrad nicht wegstellen oder wegwerfen muss. Die oft gestellte Frage, wie weit ich mit einer Akku-Füllung fahren könne (eine solche Standardfrage unter Autofahrern ist die nach dem Benzinverbrauch), kann ich leider (noch) nicht beantworten, weil ich mein Fahrrad nur zum Einkaufen und für tägliche kleine Spazierfahrten benutze.
 Abb.3 Fahrrad-Mitte mit Akku (Typ "Trinkflasche", links), Steuerung (rechts) und Sensor (unten)
Abb.3 Fahrrad-Mitte mit Akku (Typ "Trinkflasche", links), Steuerung (rechts) und Sensor (unten)

 Abb.4 Nabenmotor im Vorderrad, Kabelkupplung neben Dynamo-Halter
Abb.4 Nabenmotor im Vorderrad, Kabelkupplung neben Dynamo-Halter
Abb.5 zu langes Motorkabel um Lenkkopf geschlungen

 Abb.6 Kurbeldreh-Sensor neben der linken Tretkurbel, zu langes Sensorkabel um das Tretlagergehäuse geschlungen
Abb.6 Kurbeldreh-Sensor neben der linken Tretkurbel, zu langes Sensorkabel um das Tretlagergehäuse geschlungen
Abb.7 Kurbeldreh-Sensor neben der linken Tretkurbel, Bild von unten (Fahrtrichtung rechts)
3. Nachtrag (Oktober 2015) ↑
Nachdem ich mich intensiver mit der Technik des zusätzlichen elektrischen Fahrradantriebs befasst hatte, fiel mir auf, dass die damals von mir angeschaffte und eingangs beschriebene Steuerung speziell für Antriebe mit Nabenmotoren entworfen wurde und für Antriebe mit Mittelmotoren, die vor der Gangschaltung eingreifen, nicht erforderlich ist. In diesem Zusammenhang zog ich aus den wenigen damals verfügbaren Unterlagen und den Gesprächen mit dem Hersteller einen teilweise falschen, im folgensden Absatz beschriebenen Schluss.
Die beschriebene Steuerung beinhaltet eine Abkehr von der häufig angewendeten, gewöhnungsbedürftigen und prinzipiell nicht sinnvollen drehmomentabhängigen Unterstützungsmethode mit E-Motor: je mehr Fahrer-Drehmoment, um so mehr Motor-Drehmoment. Mit mehr Pedalkraft strengt sich der Fahrer zwar mehr an, wird aber zum Raser, dessen "elektrisches Doping" mit seiner Anstrengung proportional steigt, verleitet. Die bei diesem Prinzip nötige Messung des Fahrer-Drehmoments oder seiner Fußkraft erfordert zudem einen für eine Nachrüstung schlecht geeigneten und im Handel nicht erhältlichen Sensor.
Zur Zeit wird die Steuerung mit folgenden Worten angepriesen (Die patentierte Automatik AFFE):
Abkehr von der verbreiteten drehmomentabhägigen Unterstützungsmethode und
statt das Drehmoment mit viel Aufwand zu messen
Meine Schlussfolgerungen
gewöhnungsbedürftige und prinzipiell nicht sinnvolle drehmomentabhängige Unterstützungsmethode und
Fahrer wird durch "elektrisches Doping" zum Rasen verleitet
sind darin nicht enthalten und müssen revidiert werden, auch deshalb, weil sie sachlich nicht zutreffen.
Was mit der besprochenen Steueuerung erreicht wird, ist eine sich auf die Benutzung auswirkende Eigenschaft, die beim Mittelmotor-Konzept a priori besteht. Die Drehzahl eines Mittelmotors ist unabhängig vom eingestellten Schaltgang, sie ist proportional zur Pedalier-Drehzahl. Das vom Motor beigesteuerte Antriebsmoment wird ebenso wie das des pedalierenden Fahrers abhängig vom Schaltgang auf das Hinterrad übersetzt (vergrößert beim Runterschalten).
Bei Motoren, die direkt auf das angetriebene Laufrad wirken (mehrheitlich Nabenmotoren), ist die Drehzahl der des Laufrads proportional. Wenn wie gewünscht - und mit der AFFE-Steuerung annähernd erreicht - die vom Motor beigesteuerte Antriebsleistung im Mittel bei jedem Schaltgang und somit bei jeder Fahrgeschwindigkeit gleich groß sein soll, so muss dessen Abtriebsmoment bei jedem Gangwechsel geändert werden.
Bei Mittelmotoren sorgen ein bestimmtes Abtriebsdrehmoment (ist in der Regel auf eine verschieden hohe "Leistungsstufe" einstellbar) und die an die Pedalierfrequenz gekoppelter Drehzahl dafür, dass das Verhältnis zwischen Motor- und Fahrerleistung - Annahme: Fußkraft des Fahrers variiert nicht - konstant ist. Mit Hilfe eines zusätzlichen Drehmoment-Sensors (Messen des von der Fußkraft stammenden Antriebsmomentes) wird dieses Verhältnis sogar automatisch konstant, d.h. unabhängig von der Fußkraft gehalten. Der Fahrer wird genau proportional zur eigenen Leistung vom Motor unterstützt, egal wie schnell und/oder mit welcher Kraft er pedaliert. Das ist kein "elektrisches Doping" wie ich irrtümlich folgerte. Es entspricht sinnvoller dem Pedelec-Konzept: nicht nur Unterstützung, wenn der Fahrer pedaliert, sondern dem Pedalieren angemessene Unterstützung.
Die pure AFFE-Steuerung (keine Bewertung der Fußkraft) erlaubt, dass der Fahrer mogeln kann. Er kann ohne Kraft pedalieren und den Antrieb dem Motor überlassen.
4. Nachtrag (September 2019) ↑
Inzwischen habe ich vier weitere Fahrräder (insgesamt fünf) mit elektrischen Antrieb nachgerüstet. Das dritte Fahrrad war eine Herrenrad, das ich gleich wie das erste mit einem "Trinkflaschenakku" ausrüstete. Die anderen Räder waren Damenräder, die keinen geeigneten Platz (gerades Unterrohr des Rahmens) für einen "Trinkflaschenakku" haben.
Damenfahrrad mit Akku unter dem Gepäckträger
Bei Damenfahrrädern ist es üblich, den Akku unter dem Gepäckträger anzubringen. Nachteil dieser Position ist, dass seine relativ große Masse (mehr als 2 kg) den Schwerpunkt des Fahrrads erhöht und seine Fahreigenschaften (Halten des Gleichgewichtes) verschlechtert. Hinzu kommt, dass dadurch die ebenfalls die Fahreigenschaften verschlechternden Gepäckträgerlasten noch höher gelagert werden.
 Abb.8 Damenfahrrad mit Akku unter dem Gepäckträger:
Abb.8 Damenfahrrad mit Akku unter dem Gepäckträger:
links: Blick auf den Gepäckträger; Abmessungen des Akku-Paketes: etwa 150mm breit und 300 mm lang
mittig: Blick von der Seite; Abmessungen des Akku-Paketes: etwa 60 mm hoch und 300 mm lang
rechts: Blick auf das Schutzblech, oval ausgeschnitten
Ich erreichte bei meinem zweiten Nachrüsten im Vergleich zu den meisten im Handel erhältlichen Elektro-Damenfahrrädern dennoch etwas Verbesserung, indem ich den Abstand zwischen dem flachen Akku-Paket und dem Hinterrad so klein wie nur möglich hielt. Ich konnte ein etwa 60 mm dickes Akku-Paket ohne Gehäuse, das gerade zusammen mit der Steuerungselektrik (AFFE-Steuerung) in eine Plasik-Schachtel aus dem Baumarkt passte, kaufen. Seine Unterseite dient sogar z.T. als Hinterrad-Schutzblech, denn aus diesem schnitt ich ein ovales Stück aus, um die Schachtel tiefer setzen zu können.
Damenfahrräder mit Akku hinter dem Sattelrohr
Die Damenfahrräder, an denen ich mein viertes und fünftes Nachrüsten vornahm, hatten auch wie das zweite Nachgerüstete 26"-Räder und gleich viel Platz zwischen Sattelrohr und Hinterrad-Schutzblech: knapp 40 mm an der engsten Stelle. Damals gelang es mir nicht, diesen Platz für das Akku-Paket zu benutzen, aber nur deshalb, weil ich noch keinen Lieferanten kannte, der die einzelnen Zellen in einem Akku-Paket nach Wunsch zusammenstellt.
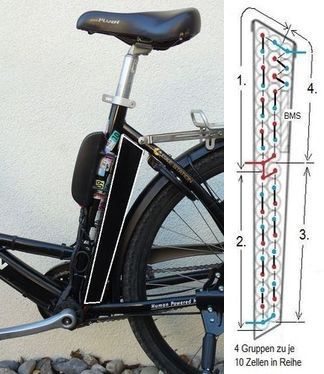
gestelltem Akku-Paket hinter dem Sattelrohr
links: Blech-Behälter für Akkus, Eigenanfertigung
rechts: Inhalt des Blech-Behälters
In Abb.9, rechts ist die Zusammenstellung von 40 Li-Ionen-Zellen (Durchmesser 18,5mm, Länge 65 mm) gezeigt. Das schraffierte Rechteck stellt die elektonische Akku-Steuerung BMS (Betriebs-Management-System) dar. Der Blech-Behälter ist 70 mm tief, so dass er auch unten neben dem Kettenrad noch Platz hat (für das breitere Akku-Paket des zweiden Fahrrades war bereits der nur noch von den Pedalarmen begrenzte Raum über dem Kettenrad nicht tief genug).
Die elektrischen Daten einer Zelle sind:
Spannung 3,6 bis 3,7 Volt und Kapazität 2,85 Ah.
10 in Reihe geschaltete Zellen ergeben die Betriebsspannung 36V des Antriebsmotors: 4 Reihen aus je 10 Zellen sind parallel geschaltet, woraus sich die
Akku-Kapazität von 11,4 Ah ergibt.